
El movimiento es el cambio de posición que experimenta un cuerpo en el espacio.
El estudio del movimiento como tal corresponde a la física y es bastante complejo. No obstante, en este blog te compartimos algunos conceptos básicos relacionados con soluciones dentro de la industria. Así, en primer lugar, debemos recordar las ramas principales que estudian diversos aspectos del movimiento:
Cinemática: estudia los tipos de movimiento independientemente de las causas o las fuerzas que lo producen. Por lo tanto, la cinemática se ocupa de la posición, el desplazamiento, la rotación, la rapidez, la velocidad y la aceleración de los cuerpos rígidos.
Mecánica: estudia los movimientos y el estado en que se encuentran los cuerpos cuando se encuentran bajo el efecto de alguna fuerza determinada.
Dinámica: estudia las causas que originan el movimiento de los cuerpos, pues este es el resultado de las interacciones con otros cuerpos luego de ejecutar ciertas fuerzas.

El fin principal de la cinemática es crear o diseñar los movimientos deseados de los elementos mecánicos que estemos considerando, para después calcular matemáticamente las posiciones, velocidades y aceleraciones que tales movimientos generarán sobre dichos elementos.
Rafael Sánchez en Conceptos y definiciones en cinemática
Para ampliar un poco los conceptos anteriores, cabe especificar que, la cinemática abarca el concepto de mecanismo como sistema de elementos configurados para transmitir movimiento de una forma predeterminada; mientras que, la dinámica es un concepto que forma parte de la noción de máquina, si esta se entiende como sistema de elementos dispuestos para transmitir fuerza desde alguna fuente de energía y de un modo, también, predeterminado.
Las máquinas son sistemas que dan lugar a movimientos definidos y que, como tal, transmiten o transforman energía. Así, en una máquina, los términos fuerza, momento de torsión (o par de motor), trabajo y potencia son los conceptos fundamentales en los que se debe pensar si se requiere una operación óptima.
Las máquinas están conformadas por cierto número de piezas, tanto fijas como móviles; a su vez, estas son agrupadas para ejecutar diferentes tipos de tareas dentro de una aplicación. Por ello, cada uno de los elementos de la máquina debe ser calculado con detenimiento para resistir eficientemente cada una de las acciones que actúan sobre estos:
- Fuerza
- Par
- Impactos
- Vibraciones
- Corrosión
- Temperatura
De acuerdo con lo anterior, el movimiento inherente a las líneas de producción, conformadas por una serie de máquinas que llevan a cabo procesos específicos y robustos, requiere necesariamente integrar componentes que garanticen no solo eficiencia, resistencia y durabilidad, sino seguridad. En ese sentido, el movimiento involucrado en las aplicaciones para la producción industrial requiere contemplar elementos de soporte (rodamientos, acoplamientos, bujes y ejes); tecnología de actuadores (hidráulica, neumática o electromecánica); componentes de retroalimentación (sensores, inclinómetros y encoders); y piezas para controlar específicamente el movimiento asociado con el torque (reductores y frenos).
Descarga el e-book ¿Cómo garantizar los resultados exitosos de tu proyecto de automatización?
Par cinemático
Un cuerpo puede cambiar de posición con respecto a un punto de referencia en un tiempo determinado y de múltiples maneras. De esta forma, el movimiento involucra dos propiedades básicas: trayectoria y distancia; la primera se refiere a la ruta sobre la cual se desplaza el cuerpo, mientras que, la segunda se refiere a la cantidad de espacio que el cuerpo se desplazó durante su trayectoria. Para esto último, la fuerza y la dirección son otras variables involucradas.
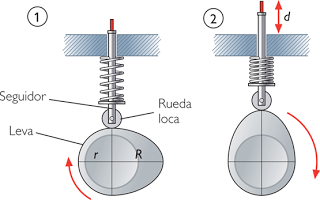
Pues bien, dentro de toda la configuración del movimiento, este también se puede encontrar limitado por la presencia de vínculos entre los cuerpos involucrados en el movimiento. Por ejemplo, en el caso de la biela y la manivela, el punto de la articulación corresponde a ambos elementos y, como tal, reduce el número de grados de libertad y limita el abanico de movimientos posibles. Entonces, cuando dos cuerpos se encuentran vinculados por un elemento, tiene lugar un par cinemático.
El par cinemático es la unión entre dos miembros de un mecanismo y se clasifican con base en los siguientes criterios establecidos por el Ing. José María Rico de la Universidad de Guanajuato:
1. El número de grados de libertad del movimiento relativo de los eslabones que están conectados por el par.
2. El tipo de contacto entre los elementos.
3. La forma en que los elementos se mantienen en contacto.
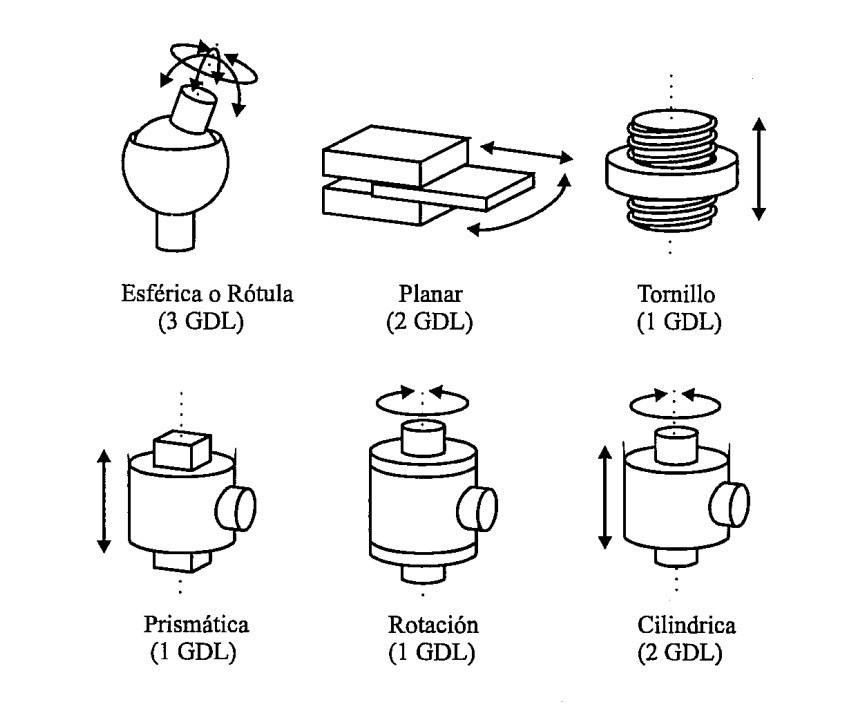
Si bien, la clasificación puntual de los pares cinemáticos es poco más complejo que un mero listado, en este blog te mostramos 6 pares frecuentes según el criterio de grados de libertad de movimiento permitidos entre eslabones:
Par esférico: permite rotación alrededor de tres ejes, lo cual significa que la rotación ocurre en torno a un punto fijo.
Par plano: permite traslación a lo largo de dos ejes y rotación alrededor de otro eje perpendicular a los otros dos.
Par helicoidal o de tornillo: permite un movimiento de traslación a lo largo de un eje y, simultáneamente, un movimiento de rotación, el cual depende de dicha traslación alrededor del mismo eje.
Par prismático: permite un movimiento de traslación a lo largo de un eje o alguna curva.
Par de revolución o rotación: permite un movimiento rotativo en torno a un eje fijo.
Par cilíndrico: permite un movimiento de traslación a lo largo de un eje y un movimiento de rotación independiente en torno al mismo eje.
Las guías lineales son un excelente ejemplo de componentes de automatización que funcionan bajo el principio del par cinemático de tipo prismático, pues permiten el contacto entre dos sólidos mediante el deslizamiento a lo largo de un eje. En tal caso, el deslizamiento es el movimiento permitido y el giro en torno a dicho eje es el restringido. Así, el movimiento relativo es una traslación y la velocidad en todos los puntos está dada por la dirección fijada mediante el vínculo.
Puede haber diferentes sistemas de guiado lineal, según la forma de resolver el par prismático entre las dos piezas principales del sistema: guía lineal de contacto, guía lineal con rodamientos y guía lineal hidrostática.
Te sugerimos “Guías lineales: funcionamiento y ventajas para tu industria”
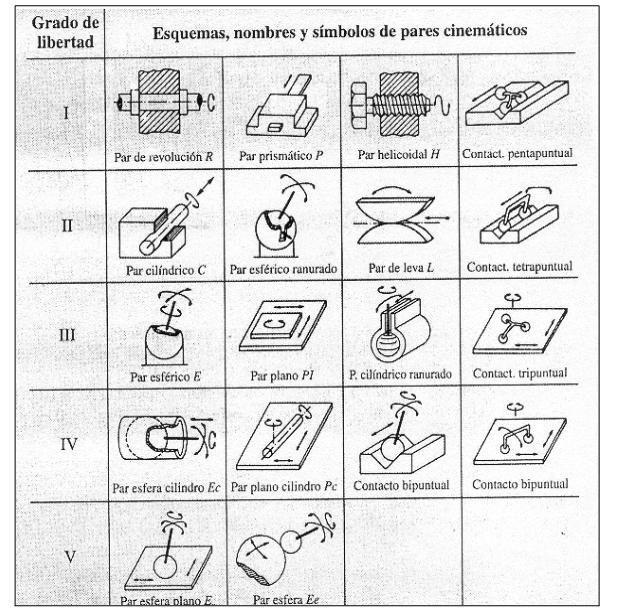
Ahora bien, la clasificación completa de los pares prismáticos, de acuerdo con sus grados de libertad, contempla 5 grados de libertad del movimiento y solamente un grado perdido de libertad. Te compartimos la siguiente imagen como referencia:
Grados de libertad
Este concepto se refiere al número de variables que se necesitan para especificar plenamente la posición de un cuerpo en el espacio y en cualquier instante. La noción de posición está estrechamente asociada con el concepto de movimiento porque indica el estado de un sistema cinemático, aun antes de que sean revisadas las fuerzas que producen dicho movimiento (dinámica). Así, y de acuerdo con el Ing. José María Rico, si se conoce la posición de un sistema cinemático, se conoce todo acerca del sistema.
Pues bien, se requieren seis variables para especificar completamente la posición de un cuerpo. De esta forma, tres variables indican las coordenadas de un punto cualquiera del cuerpo con respecto a un sistema de referencia; las otras tres, indican la orientación de un sistema coordenado que está formado por 3 líneas perpendiculares unidas al punto seleccionado del cuerpo. Cada una de estas variables es asociada con un grado de libertad.
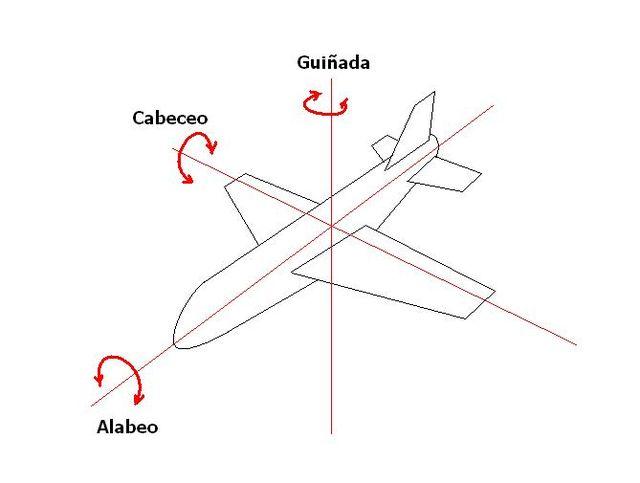
Dicho de otra forma, los seis grados de libertad se refieren al movimiento ocurrido en un espacio tridimensional (traslación en ejes perpendiculares hacia delante/atrás, arriba/abajo, izquierda/derecha) y combinado con la rotación sobre tres ejes perpendiculares (guiñada, cabeceo, alabeo).
Al ponerse en contacto con otros cuerpos, el movimiento del cuerpo original pierde grados de libertad, por ejemplo:
1. Un trompo que gira manteniendo contacto con un plano pierde un grado de libertad, el de translación a lo largo del eje perpendicular al plano de movimiento.
2. Si el trompo gira de manera tal que la punta permanece fija en un punto, pierde los tres grados de libertad asociados a la translación. José María Rico, Introducción a la cinemática de las máquinas
Desde un punto de vista de automatización, el concepto de grados de libertad es un criterio que forma parte de la descripción o las características que aparecen en las fichas técnicas de los brazos robóticos articulados. De esta manera, cada eje que integra un cobot es igual a un grado de libertad, por ejemplo. Por su parte, los robots Delta se caracterizan por desempeñarse hasta con 6 grados de libertad. Finalmente, los grippers también funcionan con base en ciertos grados de libertad, según su configuración. En todos los casos, más grados de libertad significa mayor flexibilidad para la manipulación de objetos.
Tipos de mecanismos
Luego de revisar una clasificación rápida y general acerca del movimiento, es momento de referirnos a los mecanismos como el conjunto de elementos que tienen la función de transmitir o transformar movimientos (y fuerzas) desde un elemento motriz (motor) a un elemento receptor. La finalidad es facilitar ciertos trabajos o actividades a los seres humanos, pues según la configuración de los mecanismos, estos pueden funcionar como poleas, palancas, manivelas, levas, por mencionar tan solo algunos ejemplos.
Transmisión
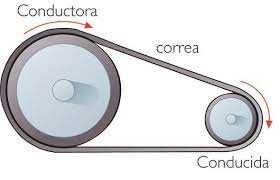
Los mecanismos de transmisión de movimiento permiten transferir energía mecánica de un objeto a otro sin cambiar la naturaleza del movimiento (rotación a rotación o traslación a traslación). Un claro ejemplo para ello son los engranajes o las ruedas de fricción, las cuales, dentro de la configuración de un motor, pueden transmitir su movimiento de rotación a la siguiente rueda. Para ello, además, es posible que se integre un componente intermediario como una correa, de manera que, ambas ruedas se mantengan con el mismo movimiento rotativo.
Transformación
En este caso, es frecuente encontrarse con la necesidad de convertir un movimiento rotativo a uno lineal. En otras palabras, estos mecanismos involucran un elemento motriz con un movimiento diferente al del elemento conducido. Un ejemplo es algún mecanismo en el que el tornillo gira y la tuerca se desplaza de forma lineal.
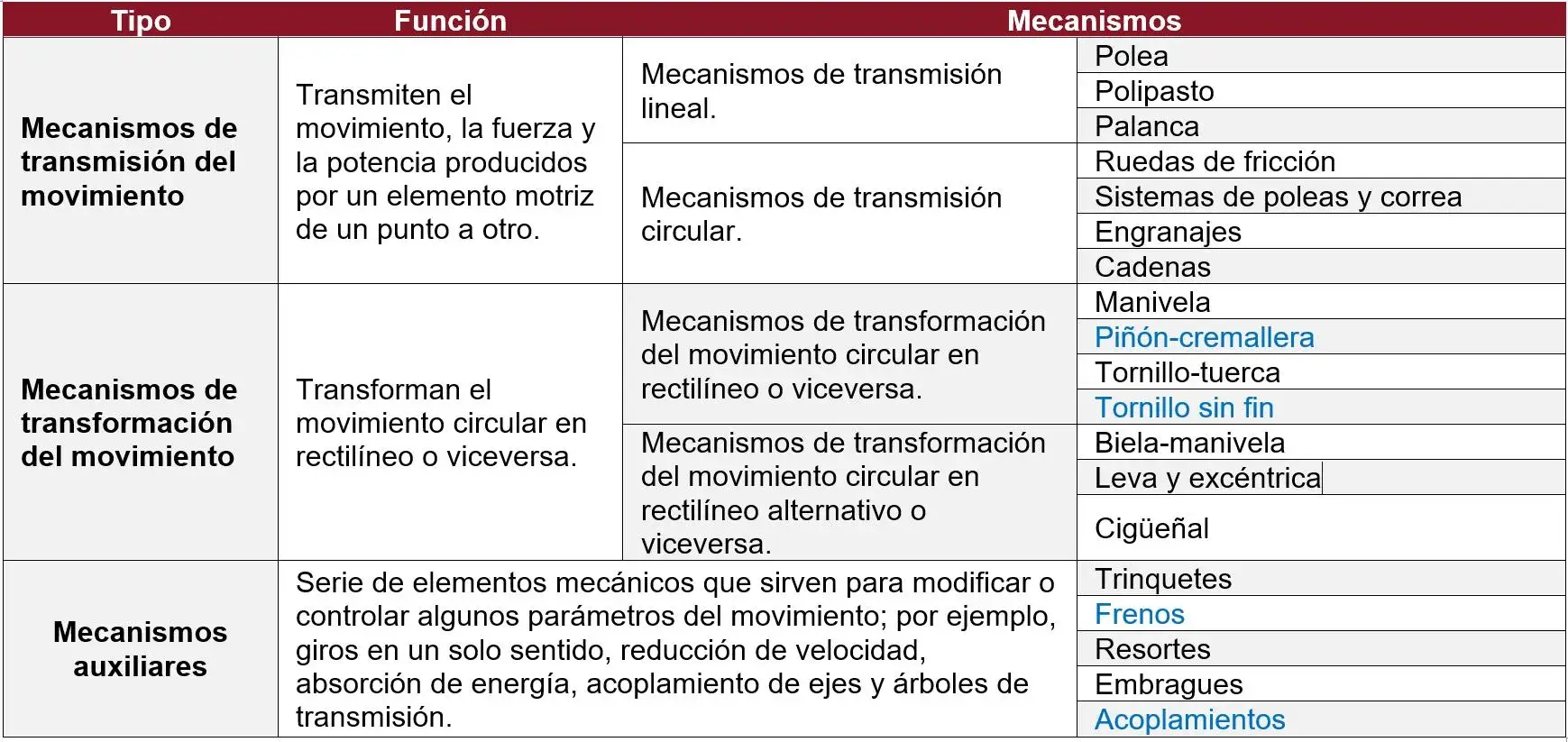
Clasificación de los mecanismos. Manuel Torres Búa.
A manera de ejemplo, todas las máquinas cuyo movimiento es generado por un motor necesitan regular el torque que este transmite, el comportamiento térmico, sus rendimientos mecánicos y adaptar la velocidad de dicho motor. Para ello, los engranajes, combinados con el funcionamiento del motor, son los componentes indicados para disminuir la velocidad de forma segura y eficiente, pues se encargan de que la velocidad de salida del motor sea menor a la de entrada.
Un reductor de velocidad, por tanto, es un tipo de sistema de transmisión de movimiento y está formado por una serie de engranajes, los cuales conforman una cadena cinemática que, a su vez, actúa sobre las piezas giratorias. El funcionamiento adecuado de un reductor implica que la transición de la velocidad inicial elevada a la velocidad menor se realice sin dañar el mecanismo del motor. Los reductores de velocidad se clasifican según el tipo de engranaje que conforma el mecanismo interno (sinfín corona o planetario, por mencionar los más comunes), o bien, por la posición del eje lento con respecto al rápido (ejes de entrada y salida).
Para todo movimiento, ¡cuenta con expertos!
¿Rotar un componente?
¿Desplazar un mecanismo?
¿Posicionar mecanismos, componentes o productos en una zona específica?
¿Determinar parámetros conforme a los cuales el movimiento de la aplicación debe funcionar de forma óptima y segura?
La respuesta para las preguntas anteriores forman parte del concepto de automatización industrial y, más aún, del control del movimiento de las aplicaciones. En tal contexto, la automatización industrial involucra necesariamente una serie de variables que requieren ser controladas mediante elementos y componentes especializados. Por ello, la selección de dichos componentes es clave para obtener un resultado exitoso. Ahora, la pregunta es ¿cómo lograr una selección acertada de cada uno de los componentes que formarán parte de tu proyecto? Debes recurrir a un proceso de cálculo y, por supuesto, a un especialista en la materia. Un servicio de cálculo oportuno reduce el riesgo de una selección empírica o basada en conceptos erróneos y garantiza, por lo tanto, el funcionamiento excelente de los equipos seleccionados.
Descarga el e-book ¿Cómo garantizar los resultados exitosos de tu proyecto de automatización?
Beneficios del servicio de cálculo de aplicación con expertos.
¡Acércate a nosotros!
URANY es tu aliado en transportadores, robótica, control de movimiento y componentes de automatización.




